优化器框架¶
Flume的优化器框架承担两个任务, 一是把逻辑执行计划转换为物理执行计划, 二是针对不同的backend对执行流程进行优化. 一般来说,每个backend都有一个对应的planner作为专用的优化器.
工作流程¶
Planner的工作流程分为三个步骤:
- 把逻辑执行计划翻译成flume任务的中间表示层Plan
- 在Plan上对执行流程进行优化, 包括通用优化和与backend有关的专用优化
- 把优化结束的Plan翻译成物理执行计划
从这里可以看出, planner与Flume-Core和Flume-Runtime中的算子执行框架具有紧密的联系.
执行计划的中间表示¶
Plan是介于逻辑执行计划和物理执行计划之间的一种表示, 这种中间表示是一棵树, 树的非叶子节点由Unit组成, 代表一个Executor, 叶子节点由LeafUnit组成, 代表Executor上的一个用户算子/数据集.
所有的叶子节点之间还有一些边表示数据集之间的依赖关系, 因此Plan的描述其实是Tree + DAG.
节点之间的父子关系在Plan中称为Control, 叶子节点之间的数据依赖在Plan中称为Dependency, Plan提供了以下接口来修改节点之间的关系:
void AddControl(Unit* father, Unit* child);
void RemoveControl(Unit* father, Unit* child);
void ReplaceControl(Unit* father, Unit* child, Unit* unit);
void AddDependency(Unit* source, Unit* target, const std::string& tag);
void RemoveDependency(Unit* source, Unit* target);
void ReplaceDependency(Unit* source, Unit* target, Unit* unit);
Unit/LeafUnit¶
Unit/LeafUnit中记录了如下信息:
- id, 仅在LeafUnit中有效, 唯一标识用户算子/数据集的输出
- type, Executor的类型, 例如DEFAULT, LOGICAL, LOCAL_SHUFFLE, EXTERNAL
- scope_level, 和Executor中的scope_level含义相同
- father, 父节点
- childs, 子节点, 包括Unit和LeafUnit
- nodes, 以当前节点为根的子树中的所有LeafUnit
- inputs, 从非nodes节点到nodes节点的所有Dependency
- outputs, 从nodes节点到非nodes节点的所有Dependency
- users, 由outputs的所有目标节点组成的集合
- needs, 由inputs的所有源节点组成的集合
- upstreams, 节点集合, 每个upstream和当前节点之间都存在一条Dependency链
- downstreams, 节点集合, 当前节点和每个downstream之间都存在一条Dependency链
优化器可以通过Unit/LeafUnit提供的接口读取以上信息
Plan¶
除了修改节点关系的接口, Plan还提供了以下方法:
explict Plan(const PbLogicalPlan& message);
根据逻辑执行计划初始化Unit/LeafUnit, 并维护节点上a的信息
Unit* Root();
获取根节点, 结合Unit中的childs信息, 可以实现对Executor-Tree的遍历
Unit* NewUnit();
创建一个新的Unit节点, 返回的节点没有父节点, 也不属于任何Dependency
void GetAllUnits(std::vector<Unit*>* result);
获取所有Unit/LeafUnit的集合
void GetTopologicalOrder(std::list<Unit*>* result);
以拓扑顺序获取所有LeafUnit的集合
优化框架¶
Flume-Runtime的优化框架由Pass和Dispatcher组成.
Pass¶
所有的优化都被认为是对Plan的一种变换, 即一个优化算法的输入是一个Plan, 输出也是一个Plan. 这种变换被抽象为Pass:
class Pass {
public:
virtual ~Pass() {}
// return true if plan is modified
virtual bool Run(Plan* plan) = 0;
};
从代码层次看,planner的执行过程是通过逻辑执行计划创建Plan, 创建多个Pass对Plan进行修改, 最后生成物理执行计划.
Dispatcher¶
通常来说, Pass对Plan进行的变换需要按照一定的顺序对Unit/LeafUnit进行遍历, 这种遍历模型就是Dispatcher.
class Dispatcher {
public:
virtual ~Dispatcher() {}
// return true if plan is modified
virtual bool Run(Plan* plan) = 0;
};
Dispatcher的接口和Pass是一样的, 两者的区别在于含义不同, Pass代表一个完整的优化过程, 经过一个Pass的处理, Plan必须处于一个合理的状态, 而一个Pass可能包括多个Dispatcher, 每个Dispatcher也可能执行多次.
RuleDispatcher¶
RuleDispatcher是一个单节点遍历模型, 它把对Plan的处理拆分成对每一个节点的处理, 对每一个节点的处理则被抽象为对这个节点使用若干Rule, 这个类定义如下:
class RuleDispatcher {
public:
class Rule {
public:
virtual ~Rule() {}
// return true if this Rule could Run(plan, unit)
virtual bool Accept(const Plan* plan, const Unit* unit) = 0;
// return true if plan is modified
virtual bool Run(Plan* plan, Unit* unit) = 0;
};
virtual ~RuleDispatcher();
virtual bool Run(Plan* plan);
virtual void AddRule(Rule* rule);
protected:
virtual bool Dispatch(Plan* plan, Unit* unit);
};
RuleDispatcher的Run方法首先从plan中获取所有Unit/LeafUnit节点, 然后对每一个节点执行Dispatch方法, 后者尝试对这个节点应用所有注册的Rule.
RuleDispatcher对Plan的遍历是无序的, 目前扩展了两类固定顺序的RuleDispatcher:
- DepthFirstDispatcher: 按照Plan中的Control关系深度遍历, 提供PRE_ORDER和POST_ORDER两种模式
- TopologicalDispatcher: 按照LeafUnit的Dependency关系进行拓扑遍历, 提供顺序和逆序两种模式
优化算法¶
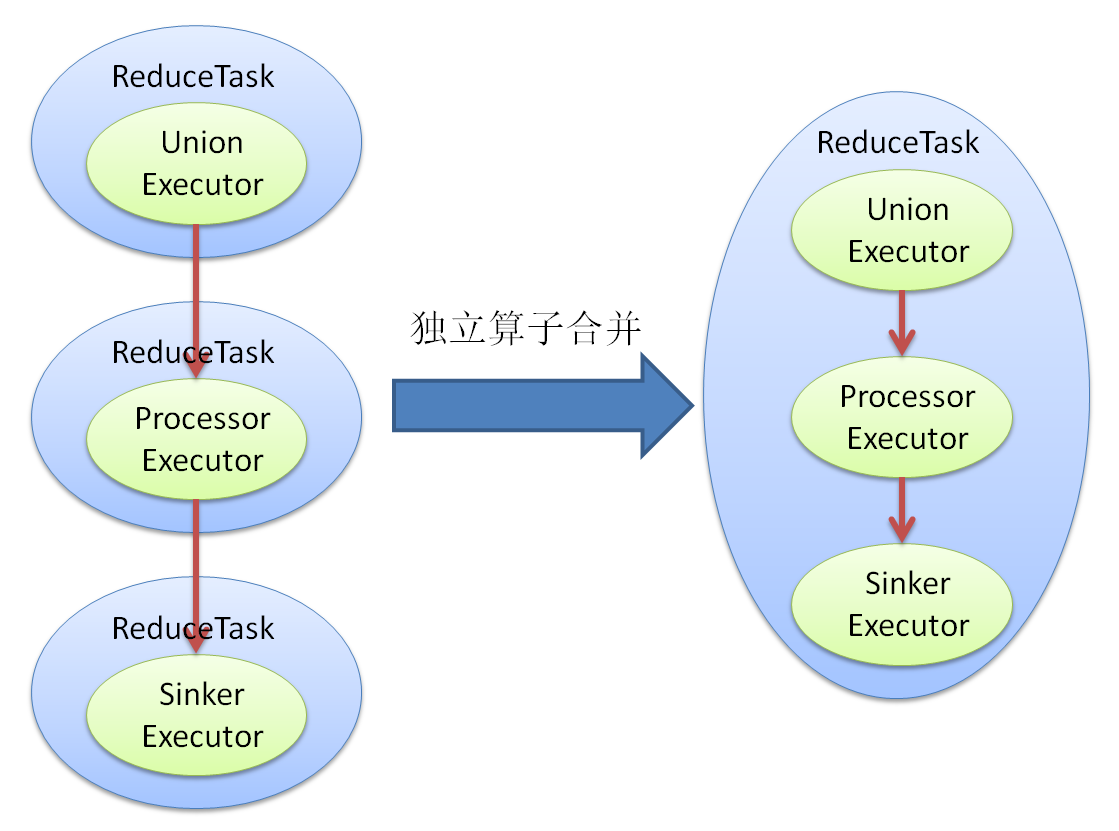
优化算法继承Pass接口, 目前支持的优化包括独立算子合并, 分桶合并, Partial-Processor前置.
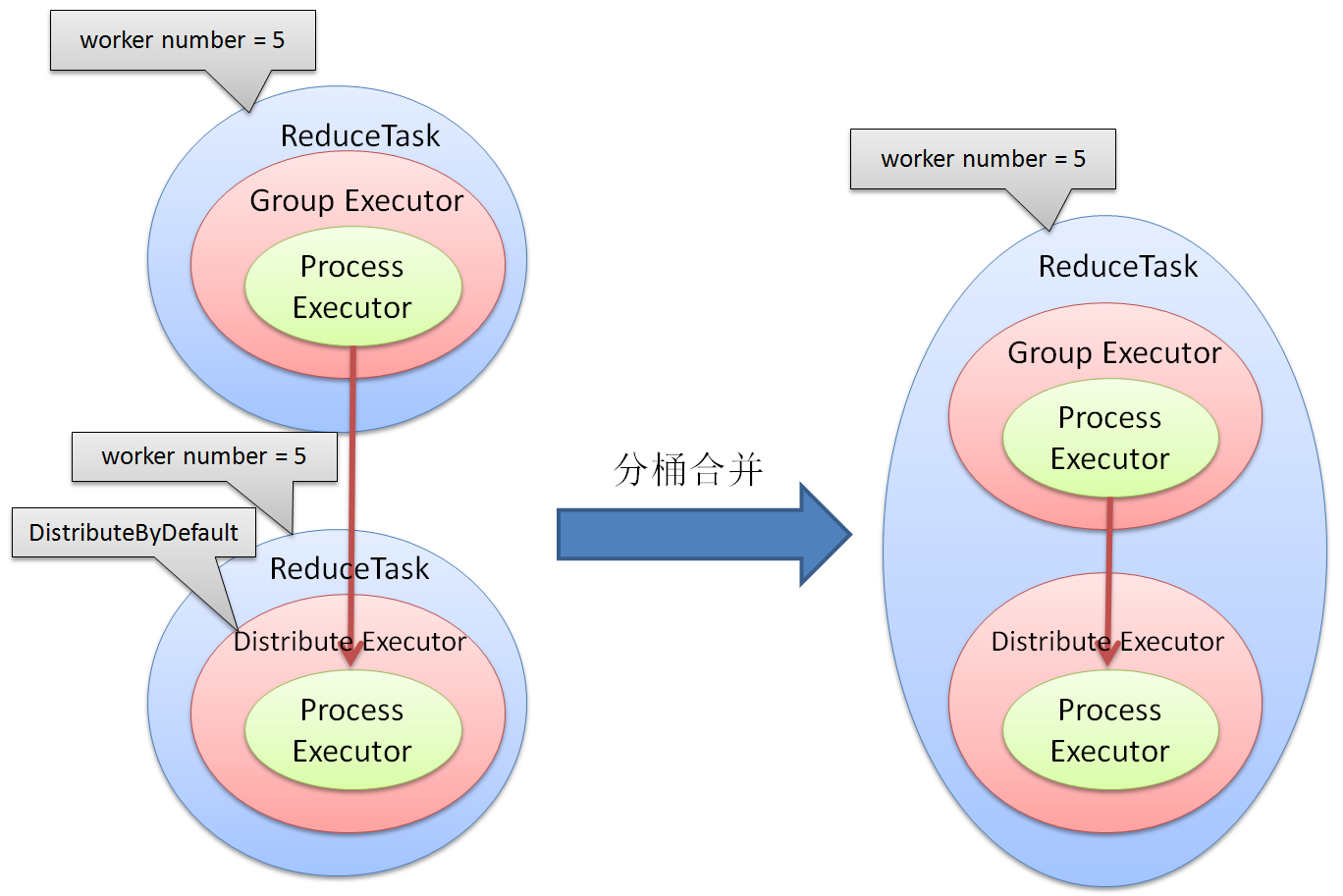
分桶合并¶
当使用分桶进行shuffle时, DistributeByDefault表明数据可以按照任意方式分成N份, 这时数据会按照flume内置的一个算法来分桶, 但如果数据在前一轮计算中已经按照某种方式分成了N份, 那么flume就没必要再进行一次分桶shuffle了, 本算法把这种情况下的分桶计算和前一轮计算合并.
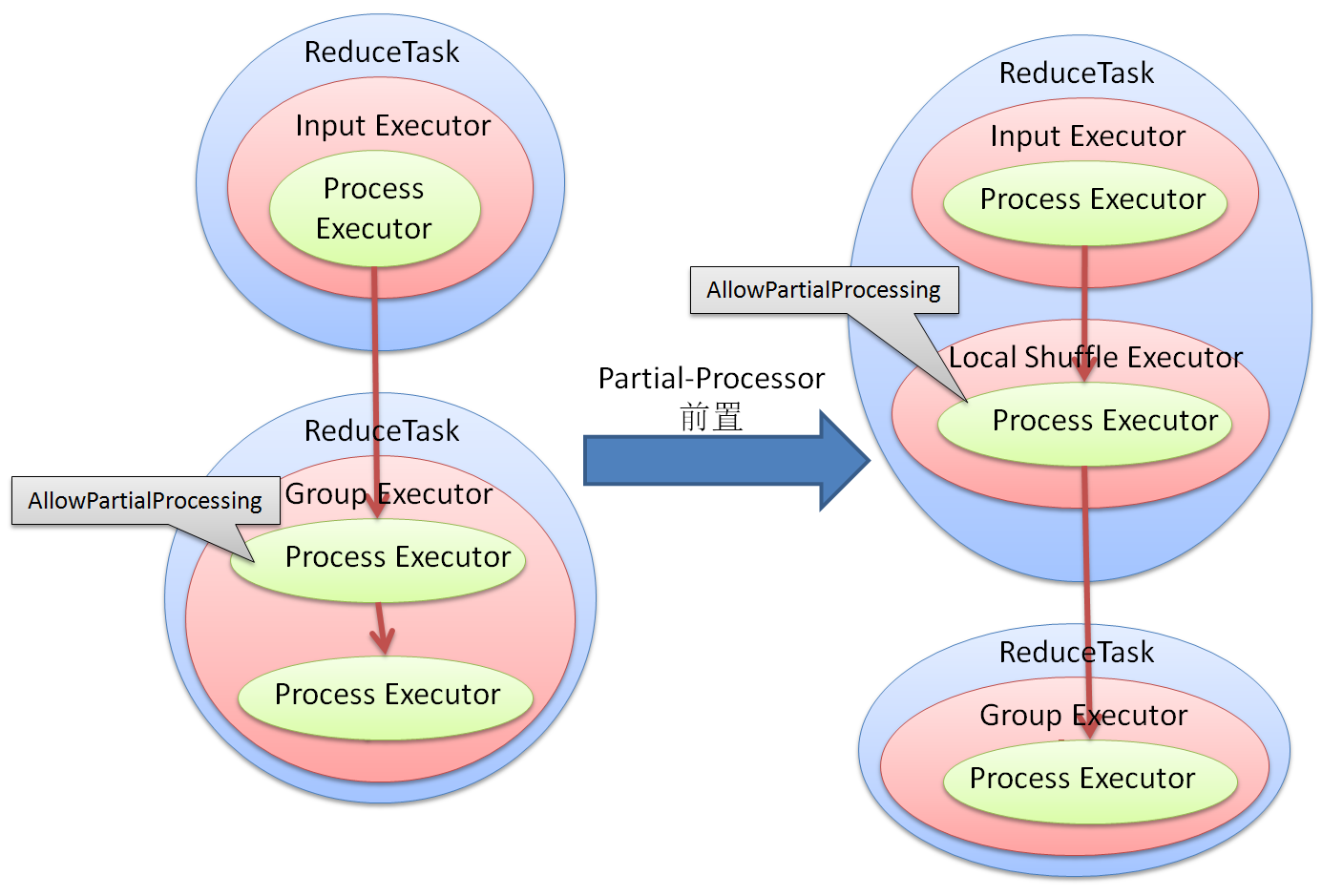
Partial-Processor前置¶
partial属性表明同一组数据可以分任意多次进行运算, 如果数据在shuffle之后进行partial运算, 本算法可以把这次运算提前到shuffle之前, 以减少shuffle的数据量.